|
|

迭代深化A*算法深度优先搜索和A*搜索的最大优点结合在启发式搜索算法中,称为A*算法(IDA*)。用最优搜索方法找到网络或树中起始状态和目标状态之间的最短路径。IDA*算法比A*算法使用更少的内存,因为它只是跟踪当前节点及其相关成本,而不是跟踪已检查的整个搜索空间。本文将研究IDA*算法的操作,以及它的优缺点和实际应用。 启发式搜索算法导论为了确定问题的最佳解决方案,启发式搜索算法以一种有系统的方式探索搜索区域。他们被应用于许多领域,包括机器人、视频游戏和自然语言处理。启发式搜索算法利用启发式函数来评估当前状态与目标状态之间的距离,以确定从起始状态到目标状态的最短路径。有各种启发式搜索算法,包括A*搜索、统一代价搜索(UCS)、深度优先搜索(DFS)和广度优先搜索(BFS)。 A*搜索算法A*搜索算法是一种著名的启发式搜索方法,它使用启发式函数计算当前状态与目标状态之间的距离。A*搜索法将起始节点到当前节点的实际代价和当前节点到目标节点的预测代价相加,确定每个节点的代价。估计当前节点和期望节点之间距离的启发式函数用于确定估计成本。然后,算法选择成本最低的节点,使其增长,并一直这样做,直到到达目标节点。 只要启发式函数是可接受且一致的,A*搜索算法就能保证找到到达目标节点的最短路径。这使它成为一种理想的搜索方法。如果启发式函数从不高估目标节点的距离,则认为它是可接受的。根据三角不等式,一致性启发式函数是当前节点到目标节点的估计代价小于等于实际代价加上下一个节点到目标节点的估计代价。 迭代深化A*算法在内存利用率方面,IDA*算法优于A*搜索算法。通过A*搜索方法将整个检查的搜索空间保存在内存中,这对于大型搜索空间来说可能是内存密集型的。相反,IDA*方法只保存当前节点及其相关成本,而不是整个搜索区域。 为了探索搜索空间,IDA*方法采用深度优先搜索。从一个等于启发式函数从开始节点到目标节点的预期代价的阈值开始。之后,它通过从开始节点开始的深度优先搜索,扩展总价格小于或等于阈值的节点。如果目标节点被定位,该方法以最佳答案结束。如果超过阈值,该算法将阈值提高到未扩展节点的最小代价。一旦目标节点被定位,算法就会重复这个过程。 IDA*方法是全面和最优的,因为它总是找到最好的解决方案,如果存在,如果没有发现,它就停止搜索。该技术使用更少的内存,因为它只节省当前节点及其相关成本,而不是已经研究过的整个搜索空间。路由、调度和游戏是实际应用程序中经常使用IDA*方法的几个例子。 迭代深化A*算法(IDA*)IDA*算法包括以下步骤:
该算法从初始代价限制开始,通常设置为到达目标节点的最优路径的启发式代价估计。
该算法从起始节点开始执行DFS搜索,直到到达代价超过当前代价限制的节点。
如果在DFS搜索过程中找到目标节点,则算法返回到目标节点的最优路径。
如果在DFS搜索过程中没有找到目标节点,则算法将代价限制更新为在搜索过程中扩展的任何节点的最小代价。
该算法重复这个过程,每次增加成本限制,直到找到目标节点。 示例实现让我们看一个图的例子,看看迭代深化a * (IDA*)技术是如何工作的。假设我们有下图,其中括号中的数字表示节点之间的旅行费用: 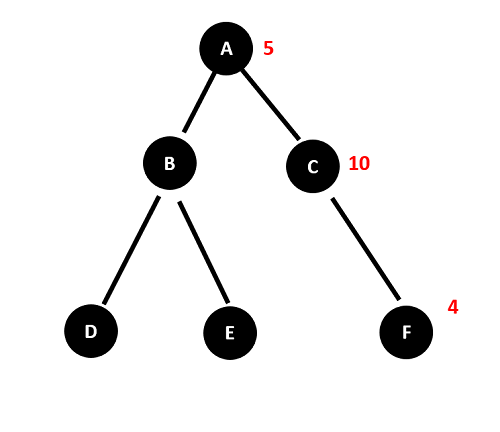 我们希望使用IDA*算法找到从节点A到节点F的最优路径。第一步是设定初始成本限制。让我们使用最优路径的启发式估计,即7(从A到C再到F的成本总和)。
我们已经完成了,因为在初始定价范围内找到了理想路线。我们会将成本限制调整为在整个搜索过程中扩大的任何节点的最低成本,然后重复该过程,直到在成本限制内无法找到最佳路径的目标节点。 IDA*方法是一种强大且适应性强的搜索算法,可用于识别各种情况下的最佳行动方案。它有效地搜索巨大的状态空间,如果存在最优解,则通过结合DFS和A*搜索的优点来找到它。 优势
缺点
|
 视频加入我们的Youtube频道:现在加入
视频加入我们的Youtube频道:现在加入
反馈
- 将你的意见发送至(电子邮件保护)
帮助别人,请分享








